Gleichstrommotor
Example Sketch Code
Beschreibung
DC Motor mit Hilfe eines Transistors mit einer Edu-Platine benutzen.
Benötigte Bauteile
- (1) x SCS Edu-Platine
- (1) x 830 Punkte Breadboard
- (1) x L293D IC
- (1) x 3-6V DC Motor mit Lüfterblättern
- (5) x M-M Kabel (Männlich zu Männlich DuPont Jumper Kabel)
Einführung in die Komponenten
L293D:
Der L293D ist ein 4-Kanal Hochstromtreiber. Er ist dazu konstruiert bidirektionale Ströme von bis zu 1000 mA bei Spannungen von 4,5V bis 36V zu generieren. Der L293D ist dazu geeignet induktive Lasten wie Relays, Magnetspulen, DC- und bipolare Schrittmotoren und weitere Lasten mit hohem Strom- bzw Spannungsbedarf zu betreiben. Alle Eingänge sind TTL kompatibel. Jeder Ausgang ist ein Totem-Pole-Ausgang mit einem Darlington Transistor und einer pseudo-Darlingtonquelle. Die Treiber sind in Paaren geschaltet. Die Treiber 1 und 2 sind zu 1,2EN geschaltet und die Treiber 3 und 4 zu 3,4EN. Wenn ein Aktivierungseingang HIGH geschaltet ist, werden die entsprechenden Treiber aktiviert und ihre Ausgänge eingeschaltet und in Phase mit ihren Eingängen gesetzt. Wenn der Aktivierungseingang LOW ist, werden die entsprechenden Treiber deaktiviert und ihre Ausgänge ebenfalls ausgeschaltet und in einen Hochimpedanzmodus versetzt. Mit den richtigen Dateneingängen formen beide Treiberpaare ein volles H (bzw Brücke), passend für Magnetspulen bzw Motoren.
Produktspezifikationen:
- Variable Spannungsversorgung: 4,5 V bis 36 V
- Separater Logikeingang
- Interner ESD-Schutz
- Überhitzungsschutz
- Gute Eingangsstörsicherheit
- Ausgangsstrom max. 1000 mA pro Kanal
- Spitzenausgangsstrom 2000 mA
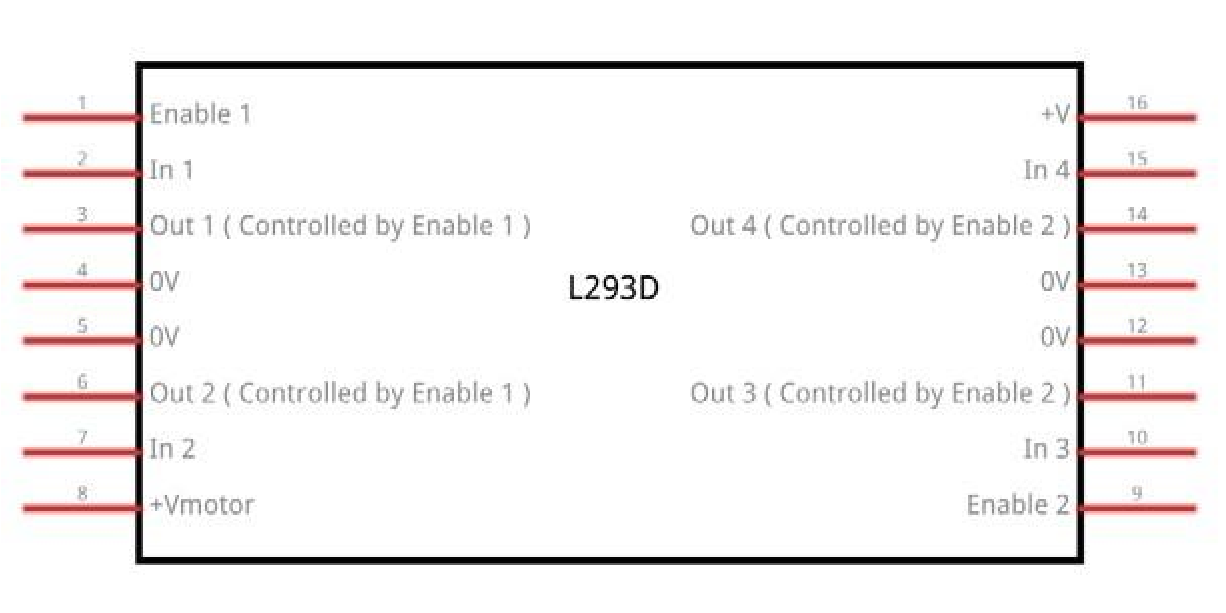
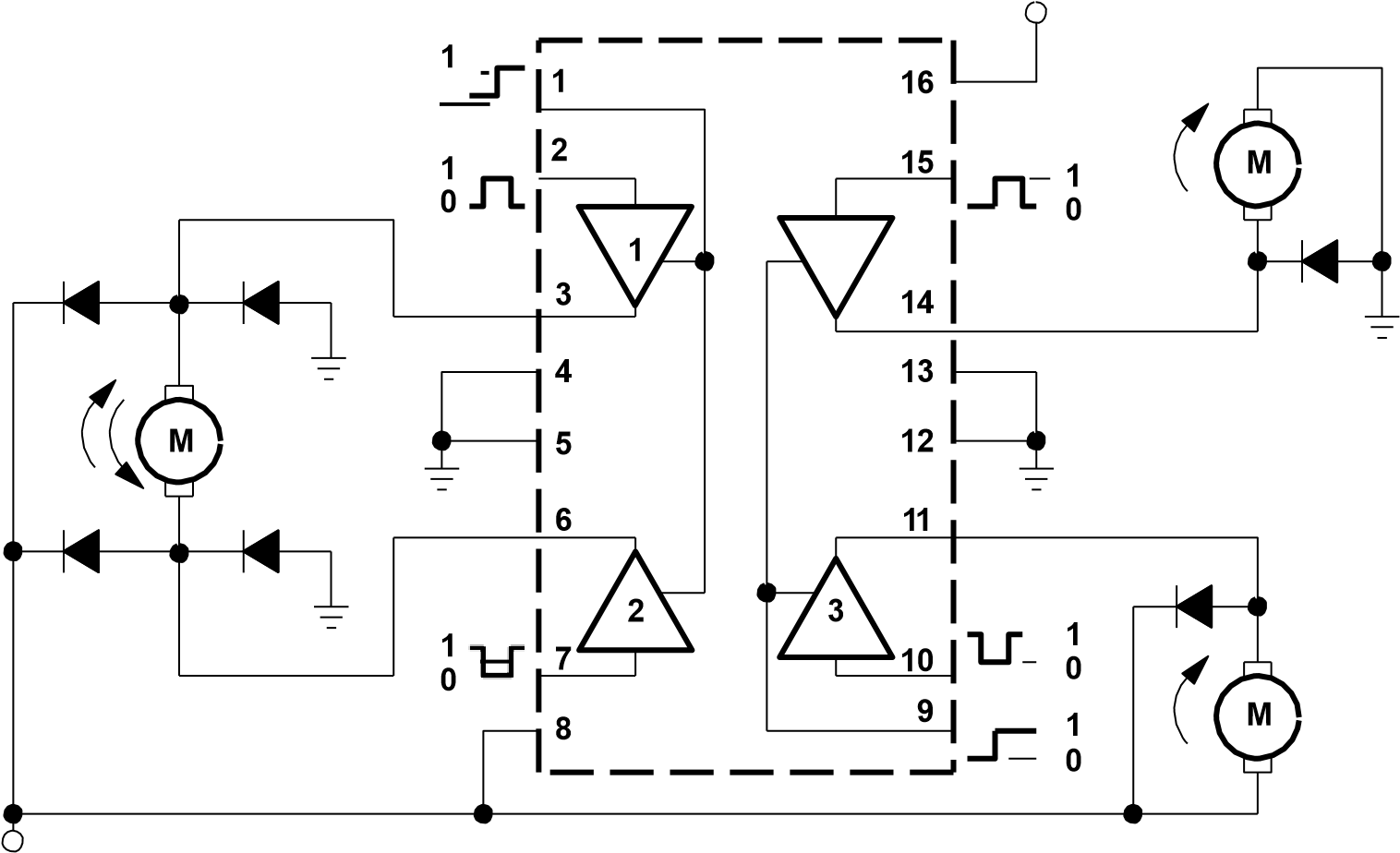
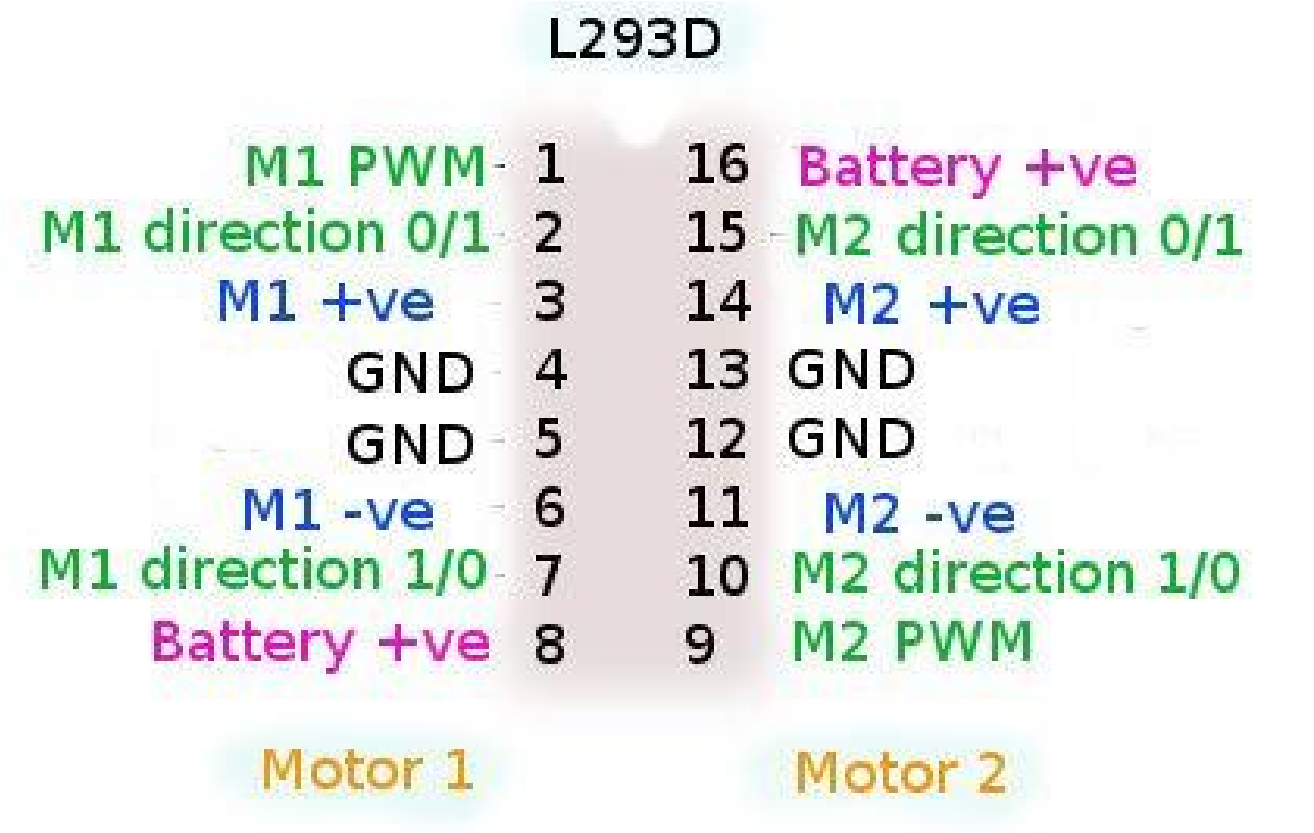
Wie man dieses Pinbelegungsdiagramm verwendet: Die linke Seite versorgt den ersten Motor und die zweite Seite kann einen zweiten Motor versorgen. Es funktioniert natürlich auch mit nur einem angeschlossenen Motor.
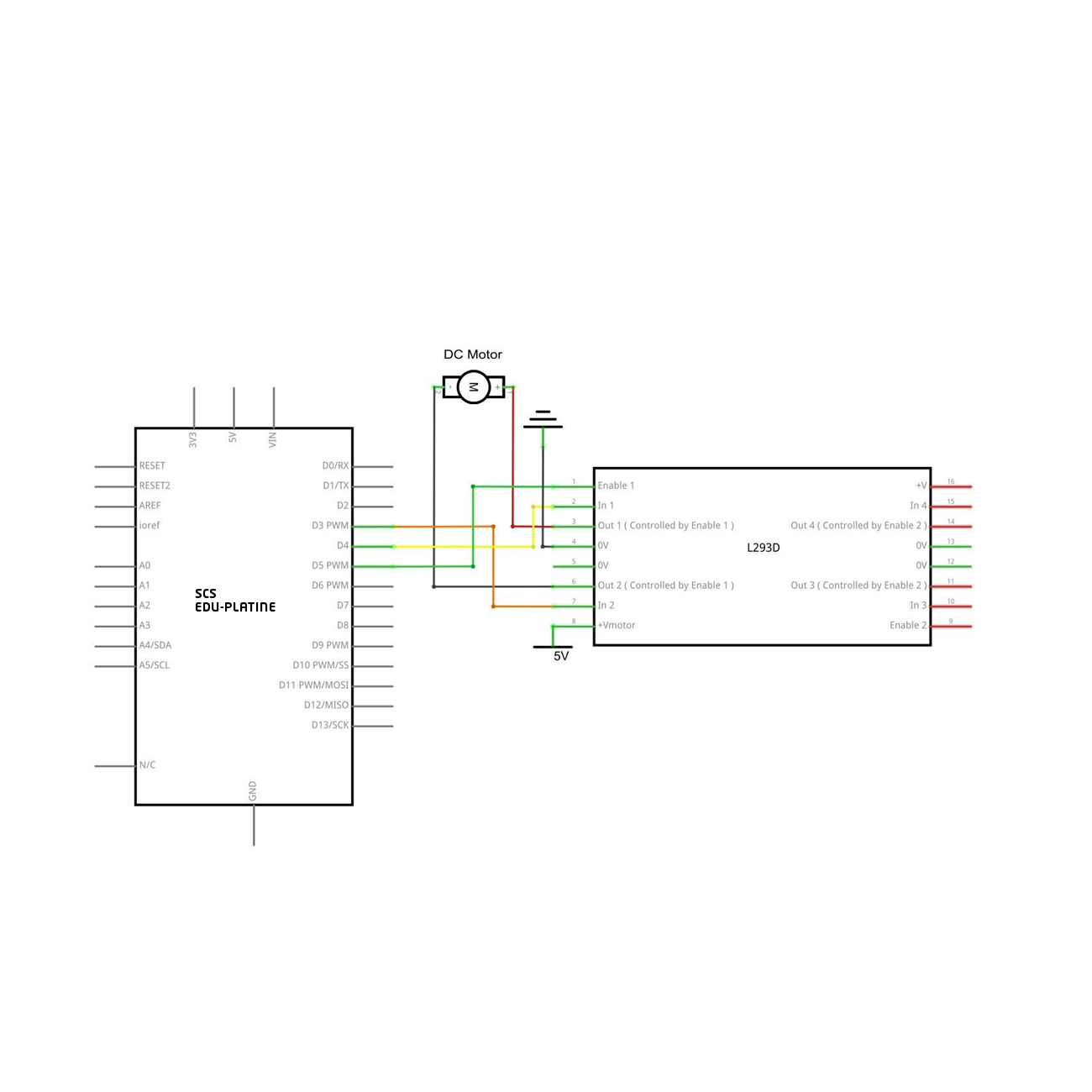
Arduino Verbindungen
Der M1 PWM des Chips wird mit einem beliebigen digitalen PWM Pin der Edu-Platine verbunden, z.B. Pin 5. Der Ausgangswert zwischen 0 und 255 bestimmt die Geschwindigkeit des Motors, wobei 0 ausgeschaltet wäre, 128 die Hälfte der Geschwindigkeit und 255 die maximale Geschwindigkeit. M1 direction 0/1 und M1 direction 1/0 werden jeweils mit einem digitalen Ausgang der Edu-Platine verbunden. Auf einem der Pins muss HIGH und auf dem anderen muss LOW gesendet werden, damit der Motor sich in eine Richtung dreht. Wenn Sie die HIGH- und LOW-Zustände umschalten, dreht der Motor in die andere Richtung.
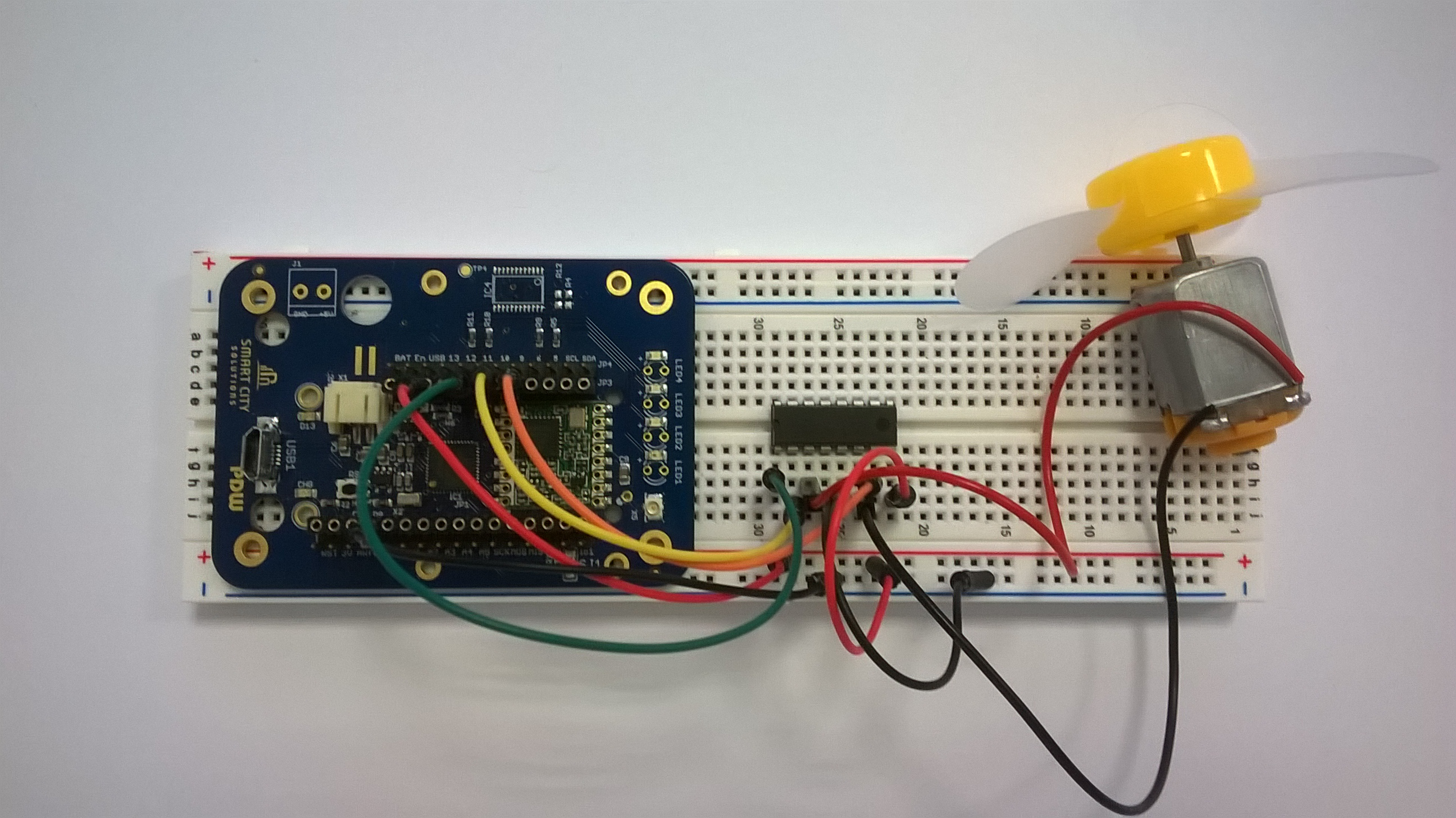
Verbindungsschema
Code
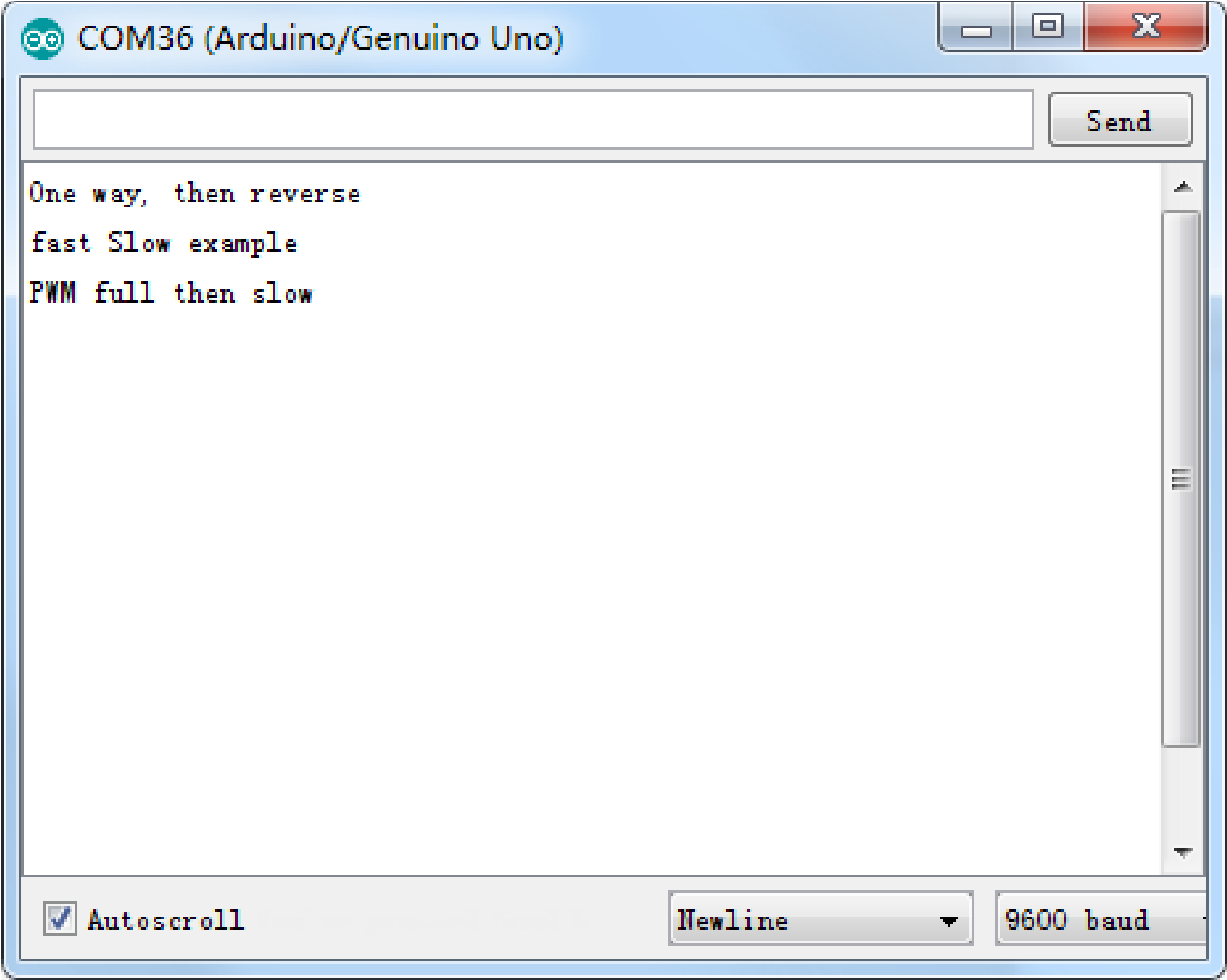
Nach dem Hochladen des Sketches wird der Motor am Anfang fünfmal leicht im Uhrzeigersinn und anschließend gegen den Uhrzeigersinn drehen. Danach fängt er an sich schnell in Richtung Uhrzeigersinn zu drehen, macht eine kurze Pause und dreht sich dann schnell in Richtung gegen den Uhrzeigersinn. Dann sendet die Platine zur Steuerung ein PWM- Signal, wobei der Motor seine Geschwindigkeit immer weiter reduzieren und danach wieder ansteigen lassen wird. Nach einer 10s-Pause geht es von vorne los.
Aufbau